



Travail de fin d'études et stage[BR]- Travail de fin d'études : Conception du système de mesure de la bande analytique de la ligne de tri "PickIt"[BR]- Stage d'insertion professionnelle : Laboratoire Gemme (ArGenCo)

Senger, Antoine 
Promoteur(s) :
Bruls, Olivier
Date de soutenance : 26-jan-2024 • URL permanente : http://hdl.handle.net/2268.2/19593
 Tous les fichiers (archive ZIP)
Tous les fichiers (archive ZIP)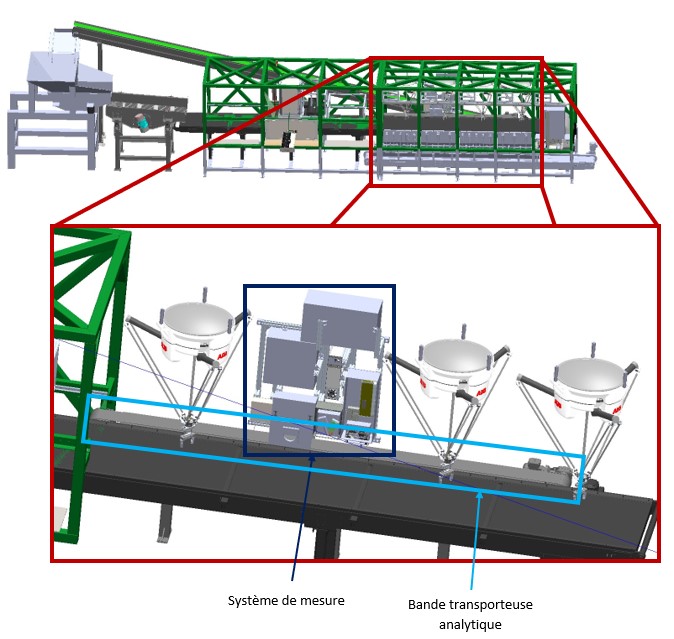 Zoom BA.jpg
Zoom BA.jpgDétails
| Titre : | Travail de fin d'études et stage[BR]- Travail de fin d'études : Conception du système de mesure de la bande analytique de la ligne de tri "PickIt"[BR]- Stage d'insertion professionnelle : Laboratoire Gemme (ArGenCo) |
| Titre traduit : | [en] Conception of the analytical conveyor measurement system of the "PickIt" sorting line |
| Auteur : | Senger, Antoine
|
| Date de soutenance : | 26-jan-2024 |
| Promoteur(s) : | Bruls, Olivier
|
| Membre(s) du jury : | Béchet, Eric
Sacré, Pierre
Morhing, Thibault |
| Langue : | Français |
| Nombre de pages : | 99 |
| Mots-clés : | [fr] PickIt [fr] Bande anayltique [fr] Robotique [fr] Automatisation [fr] Capteur [fr] tri [fr] recyclage |
| Discipline(s) : | Ingénierie, informatique & technologie > Multidisciplinaire, généralités & autres |
| Centre(s) de recherche : | Laboratoire GeMMe |
| Public cible : | Professionnels du domaine |
| Institution(s) : | Université de Liège, Liège, Belgique |
| Diplôme : | Master en ingénieur civil mécanicien, à finalité spécialisée en technologies durables en automobile |
| Faculté : | Mémoires de la Faculté des Sciences appliquées |
Résumé
[fr] Lors de ce TFE, je vais concevoir et réaliser une bande analytique servant à faire des mesures sur des pièces métalliques. Je vais donc devoir concevoir le modèle 3D afin de bien choisir les différents composants de cette bande analytique (capteurs, axes linéaires, boitiers, ventilation, protection,...). Ensuite, je vais devoir faire du code robot dans le but de Pick and Place des pièces à analyser depuis et vers la bande analytique. Par après, je vais devoir automatiser le système de mesure (vitesse de la bande analytique continue ou fragmentée et ajustement de la hauteur des capteurs grâce à des axes linéaires motorisés). Pour finir, je ferai une étude/réflexion basée sur un point important du système.
Fichier(s)
Document(s)

 TFE_Bande_analytique.pdf
TFE_Bande_analytique.pdf
Description:
Taille: 11.02 MB
Format: Adobe PDF
Annexe(s)
Choix des caméras 3D.pptx
Description: Choix caméra 3D
Taille: 1.52 MB
Format: Microsoft Powerpoint XML
Etude 1.jpg
Description: Résultatsde l'étude des paramètres de mesures
Taille: 184.08 kB
Format: JPEG
Pulse management principle.xlsx
Description: Pulse management
Taille: 889.21 kB
Format: Microsoft Excel XML
schéma communication.jpg
Description: Schéma du réseau de communication du système de mesure
Taille: 48.81 kB
Format: JPEG
Schéma puissance.jpg
Description: Schéma du réseau de puissance du système de mesure
Taille: 40.92 kB
Format: JPEG
code robot 1.jpg
Description: Code robot 1
Taille: 47.88 kB
Format: JPEG
code robot 2.jpg
Description: Code robot 2
Taille: 80.91 kB
Format: JPEG
code robot 3.jpg
Description: Code robot 3
Taille: 6.7 kB
Format: JPEG
Structure finale avec composants détaillé.jpg
Description: Système de mesure de la bande analytique
Taille: 95.73 kB
Format: JPEG
GRAFCET niv 1.jpg
Description: GRAFCET de niveau 1
Taille: 81.59 kB
Format: JPEG
GRAFCET niv 2.jpg
Description: GRAFCET de niveau 2
Taille: 70.84 kB
Format: JPEG
 ATV320_EtherCAT Manual_EN_NVE41315_03.pdf
ATV320_EtherCAT Manual_EN_NVE41315_03.pdf
Description: ATV320, variateur
Taille: 17.57 MB
Format: Adobe PDF
C6-Broschuere-Doppelseite.pdf
Description: Automation technology C6 cameras
Taille: 9.95 MB
Format: Adobe PDF
dataSheet_YF2A2D-030UV1XLEAX_6042772_en.pdf
Description: cable encodeur
Taille: 270.4 kB
Format: Adobe PDF
Enc_CNV2_dataSheet_DFV60A-22PC65536_1051309_fr (1).pdf
Description: Encodeur
Taille: 621.97 kB
Format: Adobe PDF
Innolas_SpitlightCompact100-10_fichetech.pdf
Description: LIBS 1
Taille: 537.87 kB
Format: Adobe PDF
Manuel de référence technique pour les paramètres du système.pdf
Description: Robot ABB
Taille: 14.69 kB
Format: Adobe PDF
operating_instructions_ranger3_3d_vision_en_im0080063.pdf
Description: Ranger 3 SICK
Taille: 13.47 MB
Format: Adobe PDF
P4P_Probleme_bruit.pdf
Description: Problème de bruit dans le signal
Taille: 165.43 kB
Format: Adobe PDF
Technical_Data_MGE_FR.pdf
Description: Caractéristiques des profilés Bosch
Taille: 293.87 kB
Format: Adobe PDF
Z-LASER_Datasheet_ZM18.pdf
Description: Laser utilisé avec la ranger 3 SICK
Taille: 673.7 kB
Format: Adobe PDF

Citer ce mémoire
Tous les documents disponibles sur MatheO sont protégés par le droit d'auteur et soumis aux règles habituelles de bon usage.
L'Université de Liège ne garantit pas la qualité scientifique de ces travaux d'étudiants ni l'exactitude de l'ensemble des informations qu'ils contiennent.
L'Université de Liège ne garantit pas la qualité scientifique de ces travaux d'étudiants ni l'exactitude de l'ensemble des informations qu'ils contiennent.
